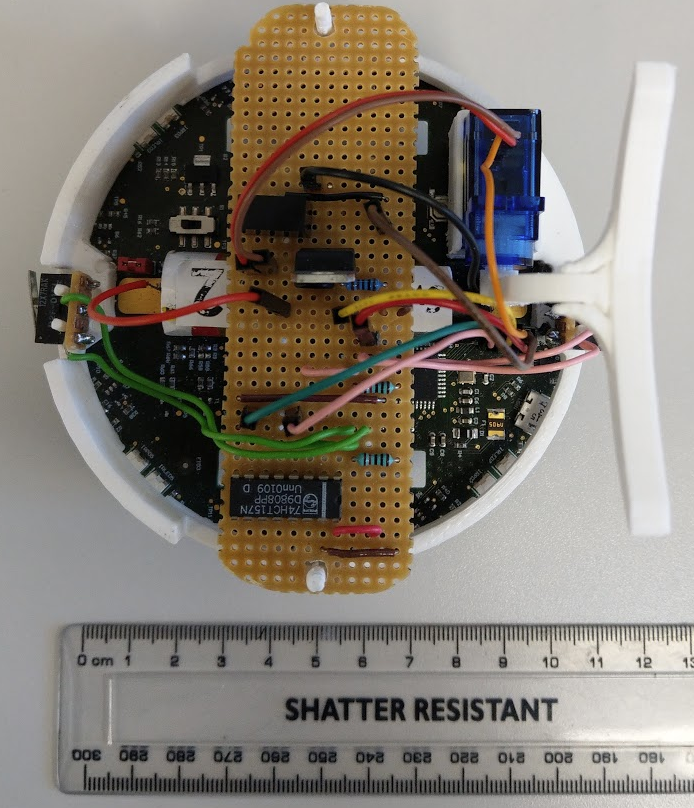
Limitations included having a restricted set of GPIO pins available on the robot’s microcontroller, which was solved by using multiplexers and programming the robot to switch and use the different signals when required. The limited amount of current available was also a challenge. The servo motor controlling the coupling arm was powered using a high-gain MOSFET, controlled by one of the microcontroller output pins, and the on-board Li-Po battery. A pulse width modulation (PWM) was used to control the MOSFET gate, and subsequently the position of the servo arm.
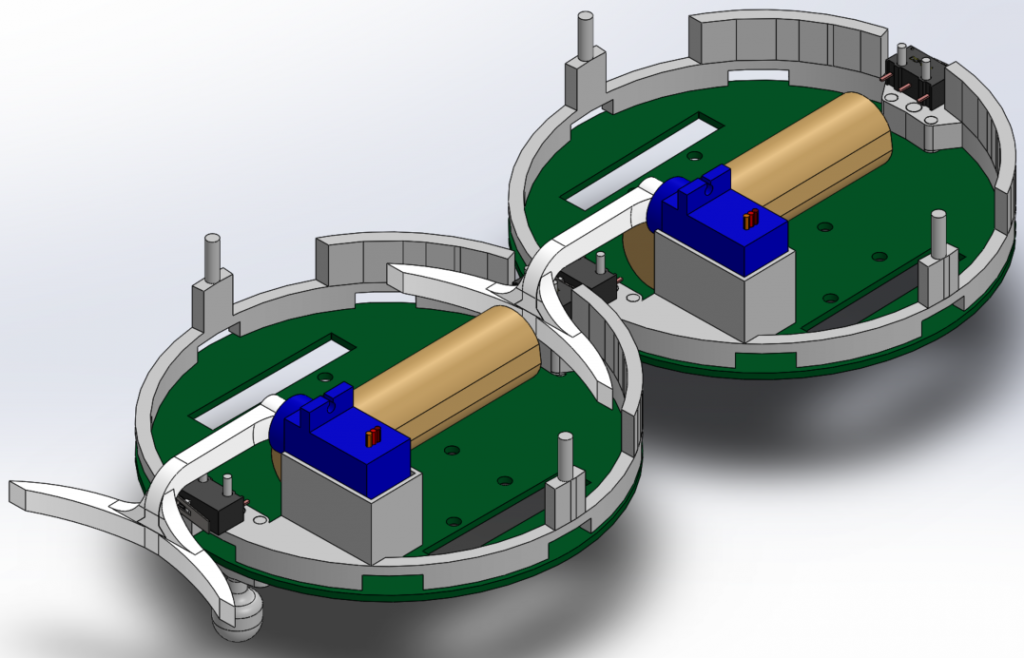
Many of the parts used in the project were 3D printed or laser cut, with the designs made in appropriate software packages such as Solidworks.